
Happymodel
CrazyF405HD ELRS 1-2S AIO FC
CrazyF405HD ELRS 1-2S AIO FC
Out of stock
Couldn't load pickup availability
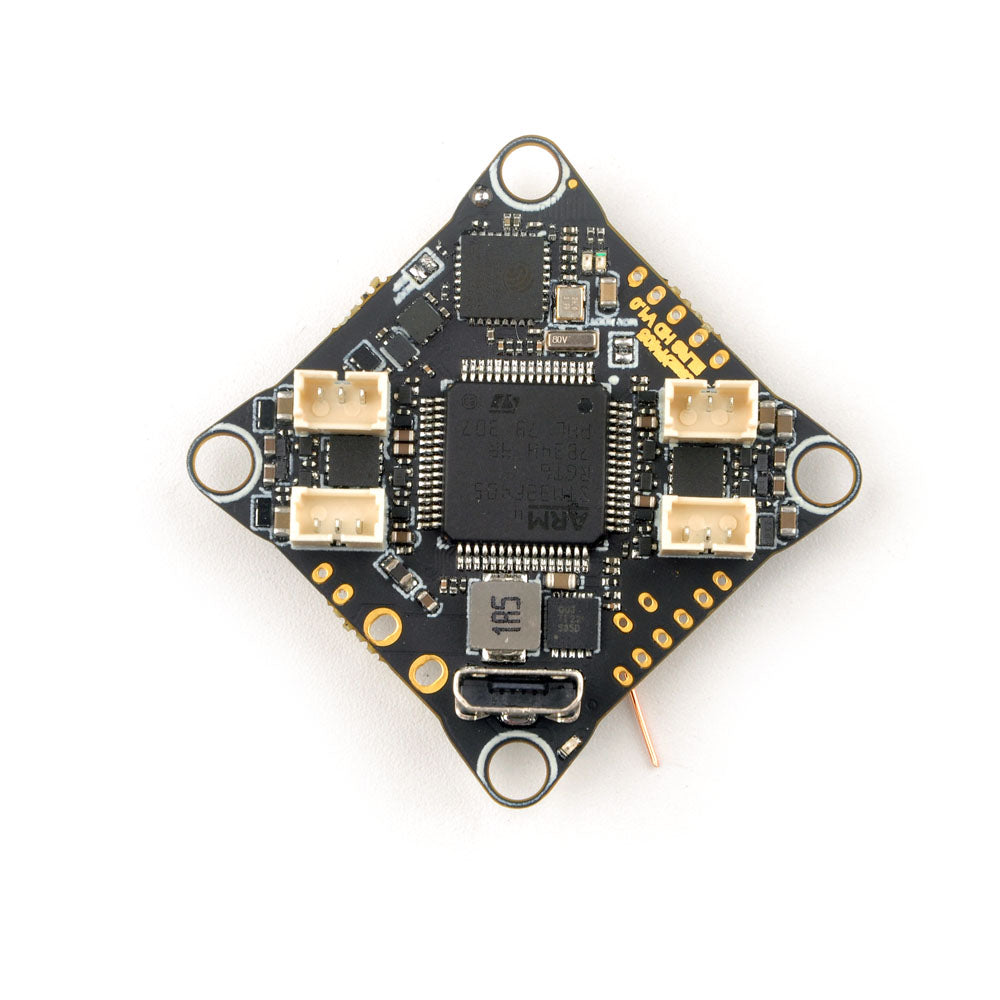
CrazyF405HD ELRS 1-2S AIO FC built-in UART ELRS receiver and 12A BLHELI_S ESC
A flight controller with a built-in Serial ELRS receiver and 4-IN-1 Blheli_S 12A ESC specially developed for Digital HD FPV, which removes the analog OSD chip 7456, optimizes the PCB layout, and supports 1-2S Lipo/LiHV lithium batteries, very Suitable for Digital HD Tinywhoop/Cinewhoop/Toothpick and other small FPV drones. The flight controller uses the F405 chip, supports Betaflight/INAV firmware, has 3 sets of complete UARTs available, and integrates a BMP280 barometer and 8Mbp blackbox, which greatly enhances the playability of the flight controller.
Specifications:
Brand Name: Happymodel
Item Name: CrazyF405HD ELRS 1-2S AIO Flight controller
Mount size: 25.5mmx25.5mm
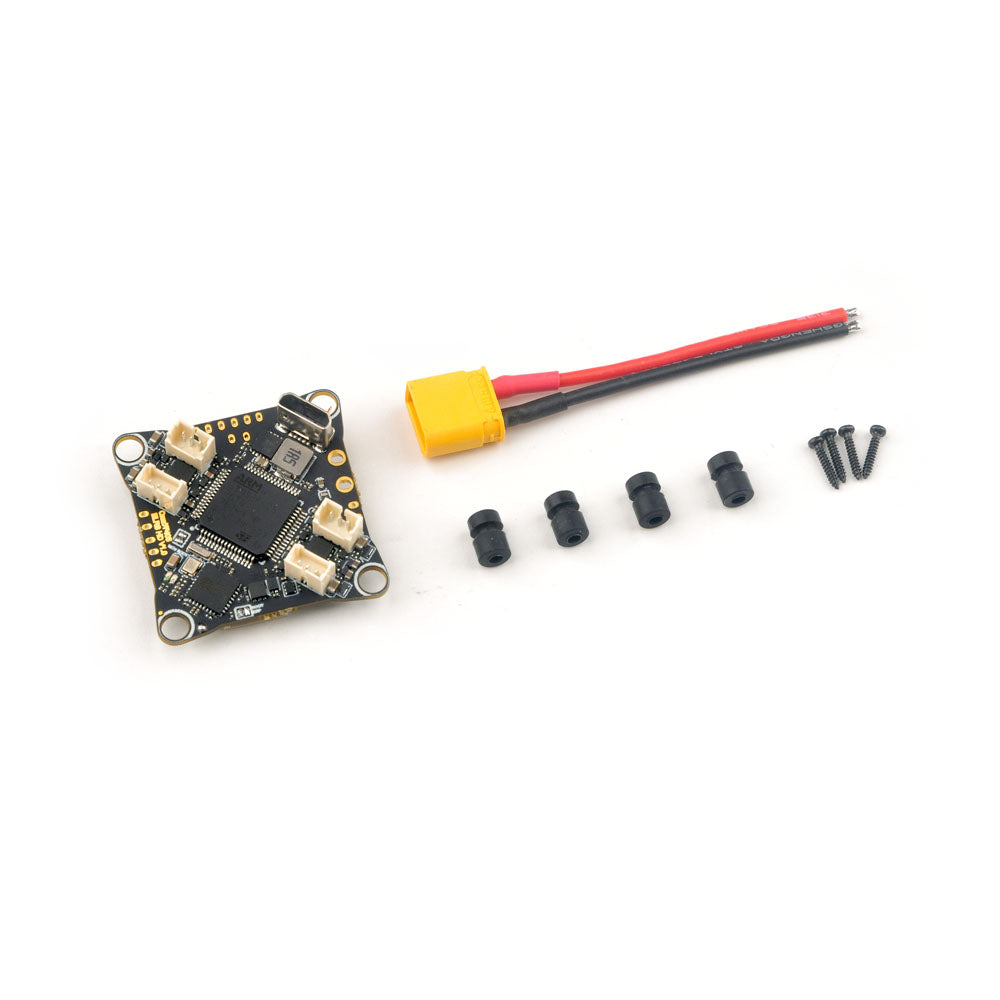
Weight: 4.8g without power lead wire
Firmware target: BetaflightF4
Support 1-2s Lipo/LiHV battery
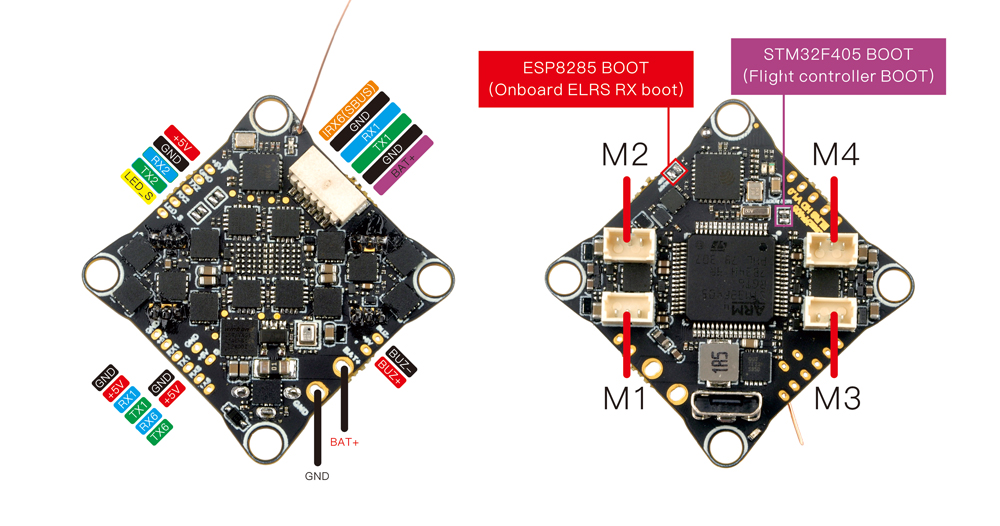
| Flight controller | MCU: STM32F405RGT6 (168MHZ, 1Mbyte FLASH) GYRO Sensor: BMI270 (SPI connection) Mount hole size: 25.5mm*25.5mm Power supply: 1-2S battery input (DC 2.9V-8.7V) Built-in 12A(each) Blheli_S 4in1 ESC Built-in Serial ExpressLRS 2.4GBuilt-in BMP280 Barometer Built-in 8MBp blackbox Built-in voltage meter sensor , voltage meter scale 110Built-in current meter sensor , current meter scale 470 |
| Onboard 4in1 ESC | Power supply: 1-2S LiPo/LiPo HV Current: 12A continuous peak 15A (3 seconds) Support BLHeli_S Bluejay firmware Factory firmware: Bluejay ESC V0.19Firmware target: Z-H-30 Default protocol: DSHOT300 When use 1s battery and high KV 0702/0802 motors, should set startup power to 1100/1200 |
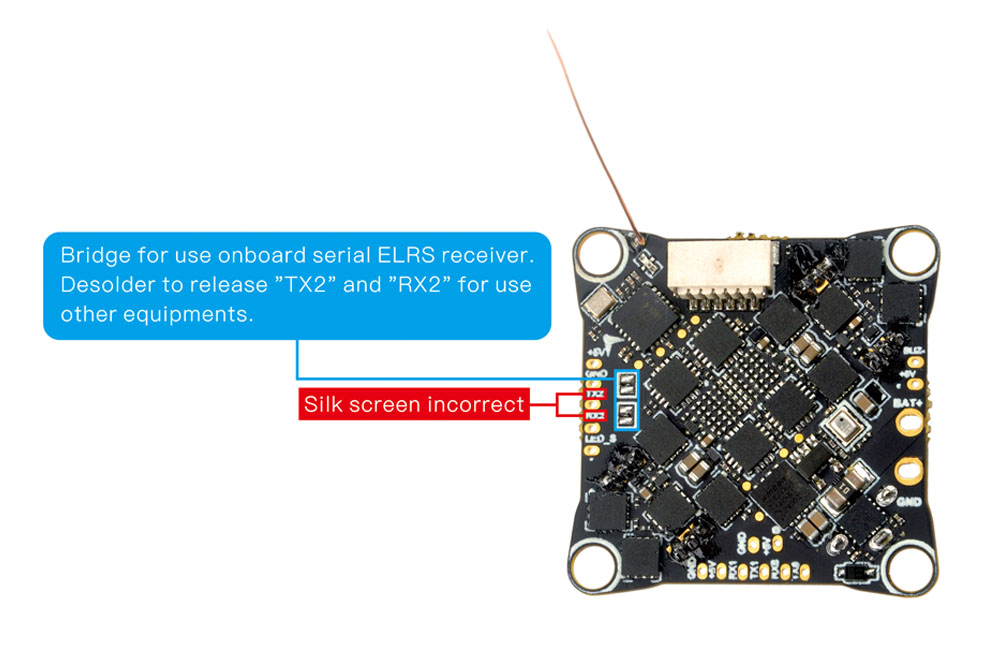
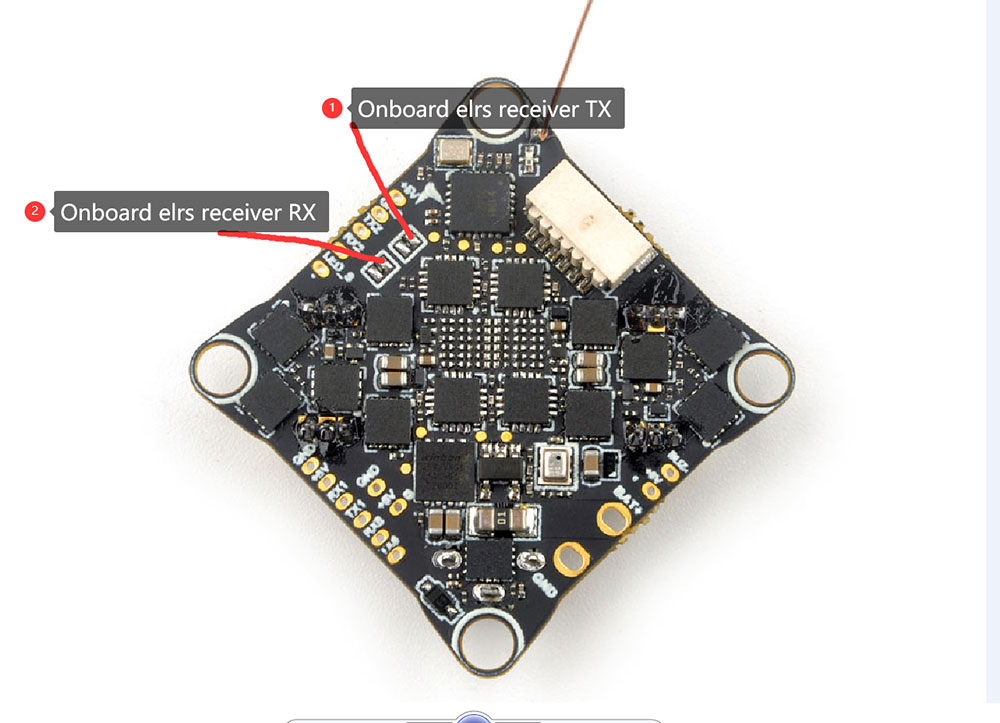
| Onboard UART ExpressLRS 2.4GHz Receiver | Packet Rate option: 25Hz/50Hz/150Hz/250Hz/500Hz RF Frequency: 2.4GHz Antenna: enameled copper wire 31mm length Telemetry output Power: <12dBm Default firmware version: ExpressLRS V3.0.1 Firmware target: HappyModel EP1/2 2400 RX Could update firmware via ExpressLRS configurator |
For original factory 4.3.2 version firmware, if you want to use BMP280 barometer, please connect to betaflight configurator and then move to CLI command, then type the following command:
resource I2C_SDA 2 B11
set baro_bustype = I2C
set baro_i2c_device = 2
2. Add BARO_BMP280 to custom defines
3. Flash the board
4.Configure resources for external BARO device for the flight controller in CLl:
resource I2C_SDA 2 B11
set baro_bustype = I2C
set baro_i2c_device = 2